

Ensayo de centro único de más de 300 casos de colecistectomía robótica de incisión única para comparar da Vinci SP con los sistemas Si/Xi
La cirugía mínimamente invasiva está entrando en la era de la cirugía robótica, siguiendo la era de la cirugía endoscópica. La cirugía robótica ha superado las incómodas limitaciones de la cirugía laparoscópica y ha hecho posible la MIS en muchas cirugías complejas. Los sistemas robóticos también se han desarrollado gradualmente, incluso los sistemas de robot SP que pueden operar con un solo orificio con una invasividad mínima. Desde que se lanzó da Vinci SP en 2018, solo se ha aplicado en unos pocos campos quirúrgicos. Las cirugías de incisión única en sí mismas no han recibido atención debido a los riesgos de las cirugías y las técnicas difíciles y no han sido promovidas para un mayor desarrollo. Sin embargo, el sistema SP tiene varias ventajas para superar las limitaciones potenciales de las cirugías de incisión única. Anticipamos que nuestra experiencia con la colecistectomía robótica SP y algunos estudios previos nos permitirán realizar un seguimiento de la MIS con técnicas más sencillas y seguridad para el paciente.
En nuestro centro, tenemos experiencia en tres tipos de sistemas robóticos. Primero, realizamos colecistectomía con sistemas Si y Xi y notamos que la fusión era difícil. Los movimientos de las manos seguían siendo incómodos y provocaron que los brazos robóticos chocaran. Posteriormente, cuando intentamos la colecistectomía SP recién insertada, encontramos que el sistema SP era más conveniente y cómodo que los sistemas Si o Xi y continuamos usando este sistema para la colecistectomía robótica de incisión única. Para confirmar la seguridad, viabilidad y conveniencia del nuevo sistema SP, analizamos las pruebas de los tres sistemas en nuestro centro.
Al comienzo de los ensayos en nuestro centro, los pacientes que se sometían a cirugías robóticas eran principalmente mujeres jóvenes con un IMC más bajo o puntajes ASA más bajos, que a menudo tenían mayores preocupaciones estéticas. Debido a que la colecistectomía robótica es una técnica relativamente nueva que requiere una mayor evaluación de seguridad, tendemos a excluir los casos complejos. Debido a la falta de pruebas suficientes sobre la seguridad y la eficacia de la cirugía robótica, existía la posibilidad de un mayor riesgo para estos pacientes. Los pacientes que pueden tener un mayor riesgo de complicaciones quirúrgicas o posoperatorias de cualquier cirugía generalmente se excluyen de la consideración de cirugía robótica. Debido a que el sistema Si/Xi se introdujo antes que el sistema SP en nuestro centro, fuimos más cuidadosos al seleccionar los casos durante las primeras etapas de nuestro experimento con Si/Xi. Después de la introducción del sistema SP, pensamos que era superior al sistema Si/Xi en términos de función mejorada y refinada, como la articulación del instrumento y el procedimiento de colecistectomía con el sistema SP en la mayoría de los casos. Por lo tanto, en términos de seguridad, esto puede explicar el hallazgo demográfico de pacientes más jóvenes y más mujeres en la cohorte Si/Xi. Sin embargo, en la actualidad, no hay restricciones de edad o género a menos que el paciente dé su consentimiento para la cirugía robótica.
La selección de casos también se aplicó a casos clínicamente complejos que incluyeron pacientes que se sometieron a cirugías abdominales superiores previas, CPRE preoperatorias o fueron diagnosticados con colecistitis aguda. Estas condiciones complejas pueden aumentar el riesgo de cambiar a cirugía laparoscópica o abierta debido a la inflamación y la adherencia. Sin embargo, ha habido algunos casos en los que se realizó colecistectomía robótica en pacientes con colecistitis aguda y en pacientes sometidos a CPRE preoperatoria con el sistema SP. Casi todos los procedimientos se realizaron con éxito, excepto un caso con colecistitis aguda, que fue derivado a cirugía abierta. En el estudio de Kang et al. Se intentaron significativamente más colecistectomías en pacientes con colecistitis aguda con SP que con el sistema Xi (31,9 % frente a 1,6 %; s<0.001)4, lo que puede indicar que la inflamación grave o la gravedad de la enfermedad influyeron en la preferencia de los cirujanos por un tipo particular de sistema robótico al realizar la colecistectomía robótica. Sin embargo, al decidir realizar una cirugía robótica, además de la seguridad de la operación, no se deben ignorar los costos médicos de la cirugía robótica.
Las cuestiones financieras y administrativas también fueron factores en la selección de casos. Las cirugías robóticas a menudo cuestan de dos a tres veces más que las cirugías abiertas o la cirugía laparoscópica en Corea. Los casos complejos tienen mayores posibilidades de someterse a una cirugía de derivación, lo que puede generar gastos adicionales para los pacientes sin los beneficios esperados de la cirugía robótica. Así, los pacientes que no cuentan con un seguro personal suelen tener dificultades para acceder a cirugías robóticas por problemas económicos. Además, algunos de ellos requieren cirugía urgente, ya que la colecistectomía robótica es difícil de realizar debido a problemas de programación y administración. La selección de casos en nuestro estudio es consistente con la de dos estudios previos realizados en Corea3,4. Siempre es una preocupación antes de la cirugía robótica en Corea. En el futuro, planeamos incluir casos más complejos y analizar los resultados postoperatorios.
Con respecto a los resultados intraoperatorios, se observó que el derrame biliar iatrogénico ocurrió con mayor frecuencia en el grupo Si/Xi. La mayor parte del derrame de bilis de la pared de la vesícula biliar ocurrió durante la disección de la vesícula biliar del hígado (disección quística de la lámina). El sistema Si/Xi, que no tenía movimiento de muñeca en sus brazos robóticos, tenía una capacidad limitada para lograr el ángulo adecuado requerido para la disección, mientras que el sistema SP permitía el movimiento multidireccional de la muñeca para una disección más precisa, lo que resultaba en un menor derrame de bilis. Además, la tasa de conversión de MIS es generalmente un indicador importante de seguridad y viabilidad. La tasa de conversión general fue tan baja como 0,9 %, sin diferencias significativas entre los dos grupos. Estudios previos con pacientes que se sometieron a una colecistectomía de incisión única usando el sistema Si o Xi han indicado bajas tasas de conversión de 0 a 3,3 %.1,3,5.
Una de las características más distintivas entre los sistemas Si/Xi y SP fue el tiempo de ejecución. Hubo diferencias significativas en todos los aspectos del tiempo de operación, incluidos los tiempos de acoplamiento, consola y necropsia real. Los tiempos de consola más cortos y la anatomía física pueden indicar un control más fácil de los brazos robóticos durante la colecistectomía. Cruz et al también informaron que los tres tiempos de acción fueron más cortos con el régimen SP.
Debido a que los sistemas Si y Xi requieren una técnica experta para la canulación curvilínea automatizada y el acoplamiento del brazo robótico, puede llevar tiempo y la posible dislocación puede provocar una colisión intravítrea. En la Fig. 3, el gráfico de tiempo de acoplamiento en el sistema Si/Xi disminuye gradualmente en estados sucesivos, mientras que el gráfico en el régimen SP muestra pocos cambios. Este hallazgo mostró que la curva de aprendizaje de acoplamiento del sistema Si/Xi es más larga en comparación con el sistema SP. Esto puede deberse a la ventaja estructural del sistema SP que requiere solo 1 brazo para acoplarse, mientras que el sistema Si/Xi requiere 3 brazos para acoplarse. Además, la función articulada de los instrumentos en el sistema SP es más ergonómica y permite un aprendizaje más fácil y una disección más cómoda, lo que resulta en una disección y un tiempo de operación más cortos. Creemos que dado que los dos sistemas son estructuralmente diferentes, los experimentos previos con el sistema Si/Xi pueden tener solo un pequeño efecto en la curva de aprendizaje y los tiempos de ejecución.
Los resultados postoperatorios, las complicaciones postoperatorias y la estancia postoperatoria fueron comparables entre los dos grupos. La composición de las heridas umbilicales en ambos grupos fue similar (datos no mostrados). El sistema SP requiere una incisión transumbilical de al menos 2,7 cm para la canulación robótica, mientras que el sistema Si/Xi puede requerir una incisión tan pequeña como 2,5 cm. Estos no afectan los resultados estéticos porque la incisión queda oculta dentro del ombligo. Sin embargo, el tamaño de la incisión puede estar asociado con la tasa de formación de hernias incisionales. En este estudio, la tasa general de hernia incisional fue del 1,5 %, sin diferencias significativas entre los grupos SP y Si/Xi. Anteriormente, se informó que la tasa de hernia en el sitio del puerto umbilical después de la colecistectomía Si/Xi era del 5,2 al 8%.5Y67.
Técnicamente, el sistema SP era más simple y conveniente (Tabla 4). Primero, entre las muchas características beneficiosas del sistema SP, el tercer brazo controlado por el cirujano para la tracción de la vesícula biliar (Figura 5) y la funcionalidad multidireccional EndoWrist (Figura 6) son, con mucho, los factores más importantes para la facilidad de disección y facilidad de control del GB, respectivamente. En segundo lugar, en el caso de Si/Xi, el estudio previo de Jung et al.8 Introdujo la técnica de puerto inverso para realizar una disección alrededor del conducto cístico y la arteria cística. Sin embargo, en SP, los brazos se pueden extender usando EndoWrist. En tercer lugar, en la colecistitis aguda, el conducto cístico a veces puede ensancharse y, por lo tanto, es difícil de ligar con un hemolock automático típico mediano-grande (verde). En el sistema SP, el asistente puede insertar un hemolock más grande (púrpura) a través del puerto de gel u otro puerto de acceso (p. ej., puerto para guantes) junto al sitio de inserción de la cánula SP para sujetar el conducto cístico (Figura 7). Además, si el conducto cístico es demasiado grueso o está acompañado por el síndrome de Mirize, no se puede ligar incluso con una gran hemorragia. Sin embargo, en el sistema SP, debido a que es más fácil suturar con una EndoWrist, se puede realizar una reparación inicial en el muñón del conducto cístico.
El sistema SP tiene tres palancas que el operador puede controlar. El brazo central, en este caso el brazo de pinzas de Cardier, se utiliza para retraer el GB (a) o tracción hepática (B).

La muñeca interna en el sistema SP permitió abordar el campo quirúrgico en el ángulo apropiado. (a) gancho; (B) Aplicación hemo-lock.
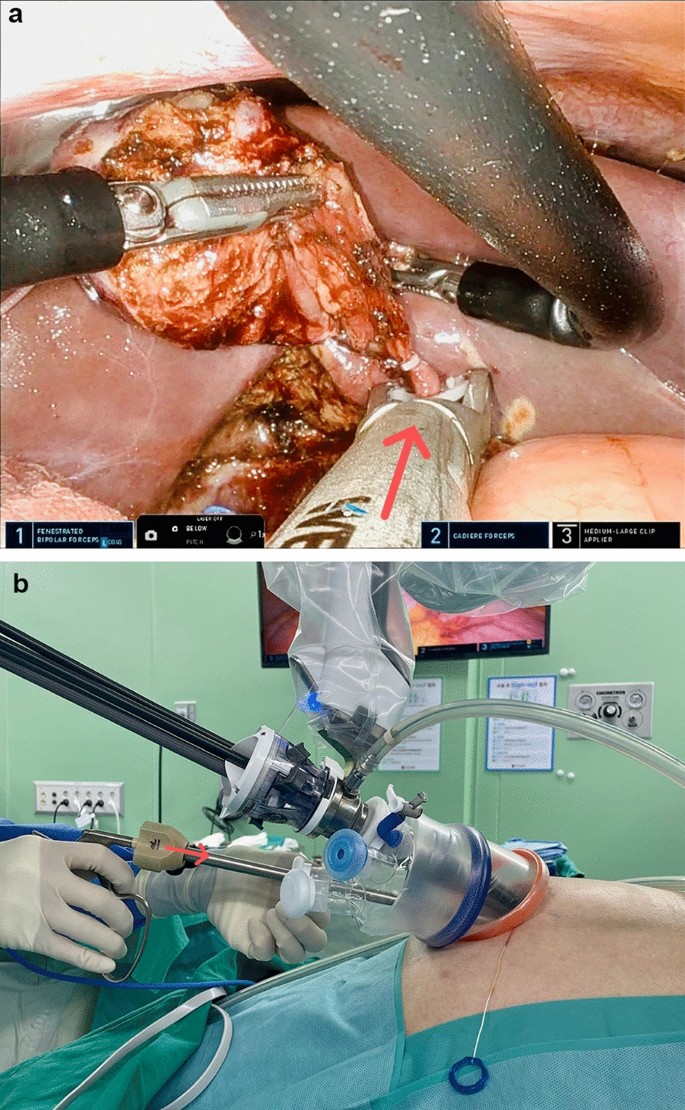
(aY B) El ayudante insertó el hemo-lock grande (flecha roja, tamaño ‘púrpura’) a través del puerto umbilical para ligar el conducto cístico.
Sin embargo, este estudio tiene algunas limitaciones. Su naturaleza retrospectiva y el tamaño de muestra relativamente pequeño pueden haber limitado los resultados. Sin embargo, todos los procedimientos de colecistectomía robótica se realizaron en un solo centro, lo que puede ayudar a mantener la consistencia del procedimiento. Hubo selecciones de casos en ambos grupos. Por lo tanto, los sistemas robóticos pueden no ser aplicables a algunos pacientes con un IMC alto o enfermedades subyacentes que afectarían significativamente el resultado de la cirugía.
La colecistectomía robótica SP se considera segura y factible en términos de complicaciones perioperatorias, bajas tasas de derivación y es adecuada para varios regímenes recientemente implementados. Creemos que la colecistectomía robótica SP es más ventajosa en términos de fusión y tres brazos robóticos con movimiento multiarticular EndoWrist, lo que nos da razones para no volver al sistema Xi.

“Defensor de la Web. Geek de la comida galardonado. Incapaz de escribir con guantes de boxeo puestos. Apasionado jugador”.