
Formas de evitar que los vehículos no tripulados vuelquen
Los rovers interplanetarios que ayudan a los humanos a explorar otros planetas tienen el potencial de desviarse del camino previsto o quedar varados cuando se deslizan sobre terreno suelto. Investigadores en Instituto de Tecnología de Shibura Para abordar este problema se ha creado una tecnología revolucionaria que permite a los rovers determinar un estado de deslizamiento en función de los cambios en la forma de sus cascos. Esta tecnología innovadora, inspirada en los músculos humanos, puede conducir a tecnologías de sensores más avanzadas que mejoren la seguridad de los viajes en vehículos autónomos.
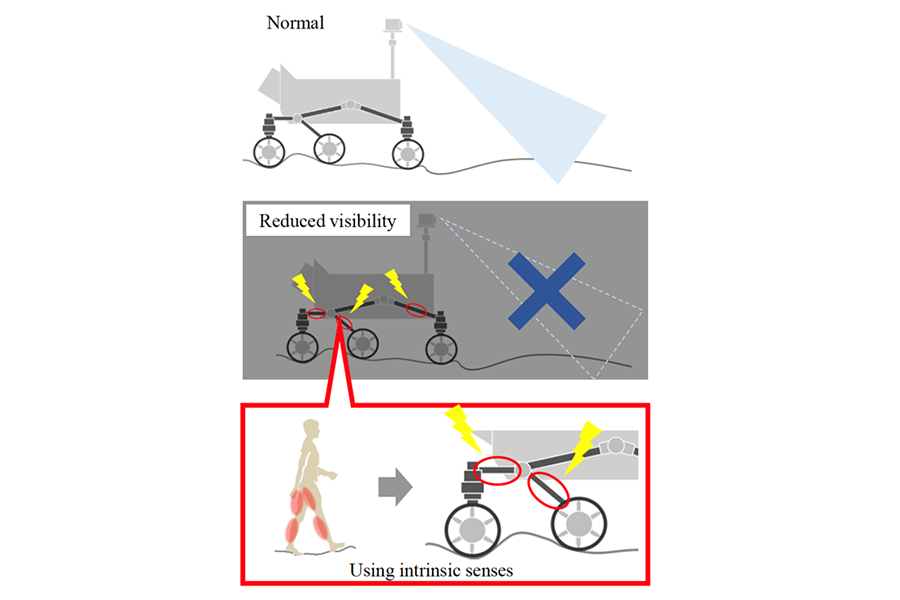
De manera similar a la forma en que los músculos humanos detectan el estado de un cuerpo en movimiento, el estado de deslizamiento de los rovers se puede determinar detectando la deformación de su estructura. Esta tecnología se puede utilizar para evitar que los vehículos se deslicen. Fuente de la imagen: Kojiro Iizuka del Instituto de Tecnología Shibaura
Las naves espaciales no tripuladas son esenciales para explorar planetas y lunas debido a las condiciones extremas que se encuentran en estas regiones. La comprensión de estos mundos alienígenas se ha beneficiado enormemente de los vehículos de exploración de Marte y la Luna de la NASA. El terreno en las superficies planetarias suele ser difícil y se caracteriza por dunas de arena, cráteres y acantilados.
Más importante aún, la movilidad del rover se ve gravemente obstaculizada por el regolito, un polvo fino que cubre estas superficies. La capacidad de los rovers para deslizarse sobre estas superficies irregulares podría obstaculizar su progreso y potencialmente poner en peligro sus misiones.
Se han estudiado muchas técnicas para determinar el estado de desplazamiento o planeo de los rovers, la mayoría de las cuales se basan en datos visuales de cámaras. Sin embargo, estas técnicas tienen algunos inconvenientes, ya que es posible que no puedan distinguir entre distintos elementos topográficos, incluidas rocas sueltas y arena.
Los rovers pueden encontrar una manera de resolver este problema aprendiendo más sobre la tracción en cada rueda. De esta forma, el rover puede reconocer más rápidamente su situación de viaje y ajustar su posición para evitar derrapes.
Esto ha sido posible gracias al reciente desarrollo de un nuevo sistema por parte del Profesor Kojiro Iizuka del Departamento de Sistemas de Instrumentación y Control de la Escuela de Ciencia e Ingeniería de Sistemas del Instituto de Tecnología de Shibura (SIT), Japón, y el Dr. Kohei Inaba. de SIT. Este sistema permite al rover detectar su estado de viaje cambiando la forma de su estructura.
Sensores remotos Los resultados fueron publicados el 30 de agosto.y2023.
Las fibras de la cadena nuclear y las fibras de la bolsa nuclear son fibras musculares únicas que se encuentran en los músculos humanos y ayudan a detectar el estado de movimiento del cuerpo. Las fibras de la cadena nuclear ayudan a establecer una postura corporal estable al detectar cambios en la tensión muscular. Por otro lado, las fibras del quiste nuclear miden la rapidez con la que se estiran las fibras musculares y ayudan a determinar el estado dinámico del cuerpo.
Al hacer comparaciones con los músculos humanos, los investigadores clasificaron el cambio en la forma compuesta, manifestado por el estrés, en dos categorías: desplazamiento del estrés y transformación vibratoria del estrés. Analizaron datos de desplazamiento de deformación utilizando fibras de cadena nuclear y velocidad de deformación utilizando fibras de bolsa nuclear.
Según el estudio de las fibras de la cadena nuclear, las fuerzas que actúan verticalmente y en la dirección del movimiento del vehículo cambian con la tensión. Por lo tanto, el seguimiento de las variaciones de presión puede permitir detectar cambios de fuerza, revelando el estado de marcha del vehículo.
Además, los investigadores descubrieron que la tasa de cambio de tensión podría evaluar con éxito el grado de deslizamiento y los cambios posteriores en el estado de desplazamiento del vehículo mediante el análisis de bolsa nuclear. Utilizando esta información, el sistema puede determinar el estado del vehículo en tiempo real, permitiéndole realizar los movimientos necesarios para evitar accidentes por derrape.
El estudio también confirma la capacidad del sistema para detectar obstáculos ambientales como grava y piedras, confirmando su capacidad para mejorar la seguridad y eficiencia del vehículo.
Al planificar la ruta del rover, se deben tener en cuenta las experiencias de este estudio para garantizar que los rovers puedan viajar con seguridad. Estos resultados representan el primer paso hacia la incorporación de elementos de la función biológica en la detección de objetos en movimiento. Creemos que nuestro enfoque también será eficaz en el futuro para los vehículos aéreos no tripulados y la conducción automatizada.
Kojiro Iizuka, Profesor, Departamento de Maquinaria y Sistemas de Control, Facultad de Ciencia e Ingeniería de Sistemas, Instituto de Tecnología de Shibura
Finalmente, este nuevo estudio representa un gran paso adelante para aumentar la seguridad y eficacia de las misiones de rovers, prometiendo avances en el estudio de planetas y otros cuerpos celestes.
Referencia de la revista
Iizuka, K., et al. (2023) Estimación del deslizamiento utilizando datos variacionales para la tensión estructural de vehículos lunares que viajan sobre suelo suelto. Sensores remotos. doi:10.3390/rs15174270.

“Defensor de la Web. Geek de la comida galardonado. Incapaz de escribir con guantes de boxeo puestos. Apasionado jugador”.