

Away Team Tech: el truco Breadcrumb de Hansel y Gretel inspira la exploración robótica de espeleología en Marte y más allá
En la impresión de este artista de un escenario de trayectoria de navegación, se pueden ver rovers autónomos explorando un tubo de lava después de ser desplegados por un rover principal que permanece en la entrada para mantener la comunicación con un orbitador o globo. John Fowler/Wikimedia Commons, Mark Tarbell y Wolfgang Fink/Universidad de Arizona
La búsqueda de un hogar en Marte pronto podría convertirse en algo, y los investigadores de la Universidad de Arizona ya están en el negocio de explorar bienes raíces que los futuros astronautas podrían usar como hábitats. Investigadores de la Facultad de Ingeniería de la UArizona han desarrollado una tecnología que permitiría a una manada de robots explorar los entornos subterráneos de otros mundos.
“Las cuevas y los tubos de lava serían hábitats ideales para los astronautas porque no tienes que construir una estructura. Estás protegido de la radiación cósmica dañina, así que todo lo que tienes que hacer es hacerlo agradable y acogedor”, dijo Wolfgang Fink, asociado profesor de ingeniería eléctrica e informática en la Universidad de Arizona.
Fink es el autor principal de un nuevo artículo en Advances in Space Research que detalla una red de comunicaciones que conectaría rovers, módulos de aterrizaje de lagos e incluso vehículos sumergibles a través de una red de estructura de celosía, lo que permite que las máquinas trabajen juntas como un equipo, independientemente de entrada humana.
Según Fink y sus coautores, este enfoque podría ayudar a abordar uno de los grandes desafíos de la tecnología espacial de la NASA al ayudar a superar la capacidad limitada de la tecnología actual para atravesar entornos seguros en cometas, asteroides, lunas y cuerpos planetarios. En un guiño al cuento de hadas “Hansel y Gretel”, los investigadores llamaron a su concepto pendiente de patente el modelo “Red de comunicación distribuida dinámicamente al estilo Breadcrumb”, o DDCN.

Un agujero en la superficie de Marte, detectado por la cámara HiRISE, reveló una caverna debajo. Estos cráteres, protegidos de la dura superficie marciana, se cree que son buenos candidatos para contener vida marciana, lo que los convierte en objetivos principales para naves espaciales, robots e incluso exploradores humanos en el futuro. NASA/JPL/Universidad de Arizona
Un cuento de hadas que inspira el futuro
“Si recuerdas el libro, sabes cómo Hansel y Gretel arrojaron migas de pan para asegurarse de encontrar el camino de regreso”, dijo Fink, fundador y director del Laboratorio de Investigación de Sistemas de Exploración Visual e Independiente en Caltech y U.A. “En nuestro escenario, las ‘migas de pan’ son sensores en miniatura que se colocan en la parte posterior del rover, y los sensores se implementan a medida que atraviesan una cueva u otro entorno subterráneo”.
Supervisando constantemente su entorno y manteniendo la conciencia de dónde se encuentran en el espacio, los rovers avanzan por su cuenta, conectándose entre sí a través de una conexión de datos inalámbrica y desplegando nodos de comunicación en el camino. Una vez que el rover detecta que la señal se está desvaneciendo pero aún está dentro del alcance, deja caer un nodo de comunicación, sin importar la distancia que haya recorrido desde que colocó el último nodo.
“Uno de los nuevos aspectos es lo que llamamos publicación oportunista: la idea de publicar ‘migas de pan’ cuando es necesario y no en un horario planificado previamente”, dijo Fink.
Y mientras tanto, no se necesita ninguna entrada del vehículo principal; Fink agregó que cada rover afiliado tomaría esa decisión por su cuenta. Fink explicó que el sistema podría funcionar de dos maneras. En uno, el rover principal actúa como un receptor pasivo, recopilando datos enviados por los rover de exploración. En el otro caso, el vehículo madre actúa como coordinador, controlando los movimientos del rover como un titiritero.
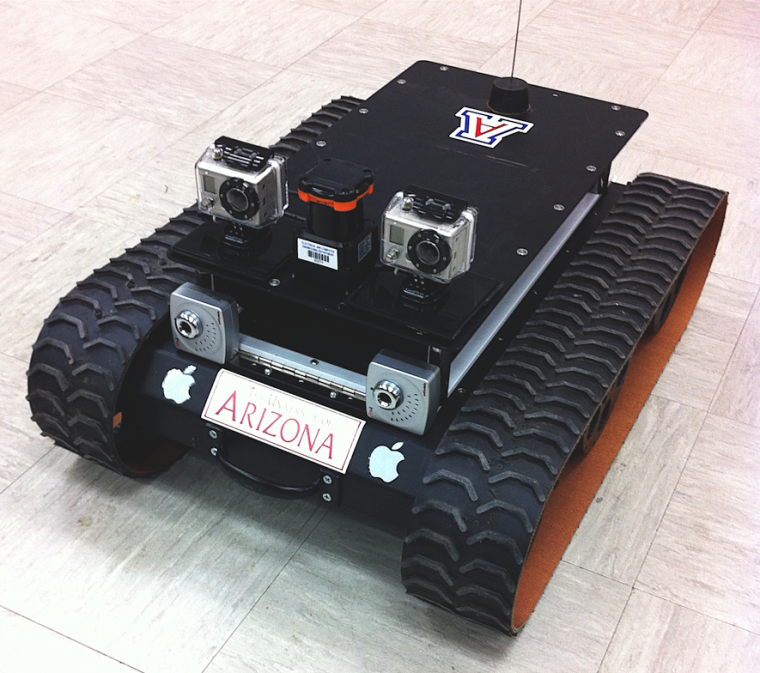
Un vehículo experimental que el equipo de Fink usó para probar hardware y software para la autoexploración. Este prototipo está equipado con cámaras y otros sensores para la navegación. Wolfgang Fink/Universidad de Arizona
Las máquinas se hacen cargo
El nuevo concepto es consistente con el modelo de encuesta escalable que Fink y sus colegas fueron pioneros a principios de la década de 2000. Esta idea prevé un equipo de robots que operan en diferentes niveles de comando, por ejemplo, un orbitador que controla un globo, que a su vez controla uno o más módulos de aterrizaje o rovers en la Tierra. Las misiones espaciales ya han adoptado el concepto, muchas con la participación de investigadores de UArizona. Por ejemplo, en Marte, Creativity es pilotada por el rover Perseverance, que es un helicóptero robótico.
Un concepto para otra misión, que finalmente no se seleccionó para su financiación, proponía enviar un orbitador con globos y un módulo de aterrizaje en un lago para estudiar uno de los mares de hidrocarburos en la luna Titán de Saturno. El enfoque de ruta de navegación lleva la idea un paso más allá al proporcionar una plataforma robusta que permite a los exploradores robóticos operar bajo tierra o incluso sumergidos en entornos líquidos. Fink dijo que tales hordas de robots autónomos individuales también podrían ayudar en los esfuerzos de búsqueda y rescate después de los desastres naturales en la Tierra.
El mayor desafío, dijo Fink, además de llevar los vehículos dentro del entorno subterráneo en primer lugar, es recuperar los datos que están registrando bajo tierra y traerlos de vuelta a la superficie. El concepto DDCN permite que un equipo de rovers navegue incluso en entornos subterráneos complejos sin perder el contacto con el “rover madre” en la superficie. Equipados con un sistema de detección de luz y rango, o LIDAR, pueden incluso trazar pasajes de cuevas en las tres dimensiones, a diferencia de los drones que se pueden ver explorando naves extraterrestres en la película “Prometheus”.
“Una vez desplegados, nuestros sensores crean automáticamente una red de malla no enrutada, lo que significa que cada nodo se actualiza en cada nodo a su alrededor”, dijo Fink, quien explicó por primera vez el concepto DDCN en una propuesta a la NASA en 2019.
“Pueden cambiar entre sí y compensar los puntos muertos y las interrupciones de la señal”, agregó Mark Tarbell, coautor del artículo e investigador principal en el laboratorio de Fink. “Si algunos de ellos mueren, todavía hay comunicación entre los nodos restantes, por lo que la nave nodriza nunca pierde el contacto con el nodo más lejano de la red”.
misión sin retorno
La sólida red de nodos de comunicación garantiza que todos los datos recopilados por los exploradores robóticos regresen al vehículo principal en la superficie. Por lo tanto, no hay necesidad de recuperar los robots una vez que hayan hecho su trabajo, dijo Fink, quien popularizó la idea de usar conjuntos de sondas de superficie robóticas prescindibles y móviles ya en 2014.
“Está diseñado para ser prescindible”, dijo. “En lugar de desperdiciar recursos para llevarlos a la cueva y volver a salir, tiene más sentido que vayan lo más lejos posible y los dejen atrás una vez que hayan cumplido su misión, se hayan quedado sin energía o sucumban a un entorno hostil. ”
“El enfoque de red presentado en este nuevo artículo tiene el potencial de anunciar una nueva era de descubrimientos planetarios y astrobiológicos”, dijo Dirk Schulze-Macuch, presidente de la Sociedad Alemana de Astrobiología y autor de varias publicaciones sobre vida extraterrestre. “Finalmente nos permite explorar las cuevas de tubos de lava marcianos y los océanos subterráneos de lunas heladas, lugares donde podría existir vida extraterrestre”.
El concepto propuesto “tiene magia”, según Victor Becker, profesor de hidrología, ciencias atmosféricas y ciencias planetarias y de la Tierra en la Universidad de Arizona. “Los descubrimientos más asombrosos de la ciencia suceden cuando los avances tecnológicos brindan acceso por primera vez a un objeto o lugar y los medios para comunicar su descubrimiento a las mentes creativas que buscan comprender”, dijo Baker.
Explora mundos oceánicos ocultos
En lugares donde se requieren robots sumergibles, el sistema podría consistir en una sonda, ya sea flotando en un lago, como en Titán, o asentada sobre hielo sobre un océano subterráneo como Europa, conectada a un submarino, por ejemplo, a través de un cable largo. Aquí, los nodos de conexión actúan como repetidores, lo que aumenta la señal a intervalos regulares para evitar que se degrade. Lo más importante, señaló Fink, es que los nodos tienen la capacidad de recopilar datos por sí mismos, por ejemplo, medir la presión, la salinidad, la temperatura y otros parámetros químicos y físicos, e incorporar los datos en el cable que se conecta de nuevo al módulo de aterrizaje.
“Imagine que llega a Europa, se derrite a través de kilómetros de hielo y llega al océano subterráneo, donde se encuentra rodeado de vida extraterrestre, pero no tiene forma de traer los datos a la superficie”, dijo. “Este es el escenario que debemos evitar”.
Habiendo desarrollado rovers y tecnología de comunicación, el grupo de Fink ahora está construyendo el mecanismo real mediante el cual los rovers desplegarán nodos de comunicación.
Fink dijo: “Básicamente, vamos a enseñar a ‘Hansels’ y ‘Gretels’ cómo dejar caer migas de pan para que se sumen a una red de malla de trabajo.
Un modelo de red de comunicación estilo Breadcrumb de Hansel & Gretel implementado dinámicamente que utiliza la estructura de malla para explorar los planetas del subsueloAvances en la investigación espacial
astrobiología, equipos invitados,

“Defensor de la Web. Geek de la comida galardonado. Incapaz de escribir con guantes de boxeo puestos. Apasionado jugador”.